brief
Personal development on ROS concepts such as setting up workspace, building custom packages, nodes, topics and launch files.
outcomes
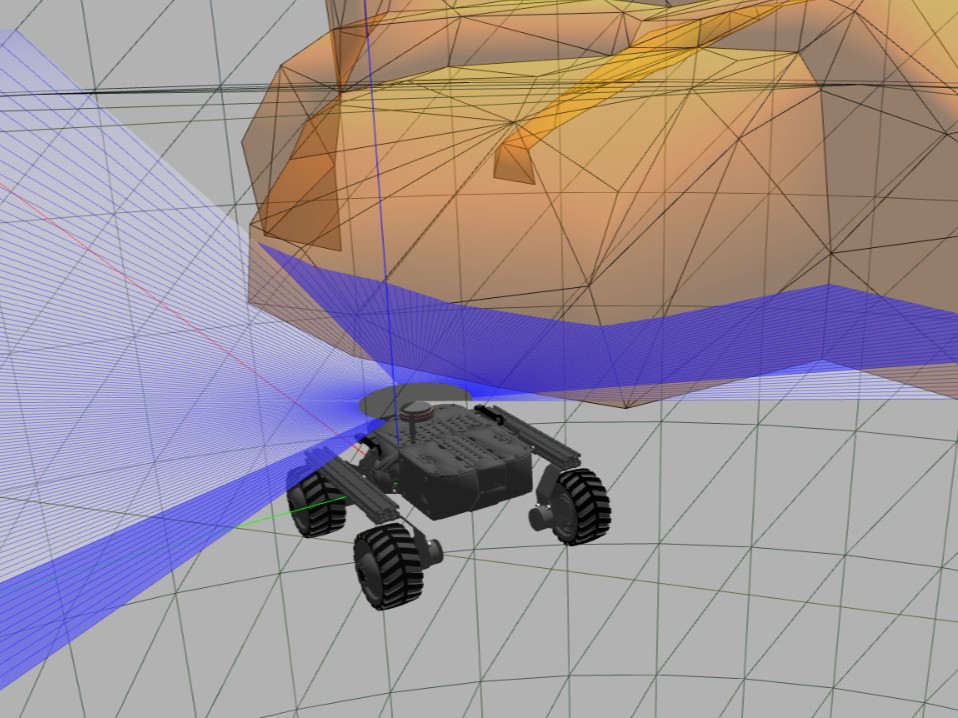
Developed simple autonomy for leo rover (ROS2 C++, Linux), incl. obstacle avoidance using LiDAR scan topics and target detection to identify objects such as ‘plants’ based on colour using camera data (OpenCV).